Scaling OpenDroneMap for the Humanitarian Sector


OpenDroneMap is a tool for map-making using aerial imagery from drones, balloons, kites and street-view data. Photogrammetry, the science and technology of using aerial imagery to make maps, has long been the mainstay of national mapping agencies to make topographic maps across large areas (Figure 1 below), and more recently Google has applied the same techniques for aerial and satellite imagery to add point of interest data to its map apps.

In 2017, Gartner Inc. estimated that almost three million drones would be produced that year, 39% more than in 2016. This recent rapid growth of drone availability has meant that aerial mapping and monitoring can now be done without requiring the expense of a piloted aircraft.
It has opened the door to aerial mapping across multiple sectors.
Drone imagery is now being used to measure crop-health, monitor shark movements and create maps for disaster response. In contrast to existing commercial systems, the demands of the humanitarian sector, including custom processing, sustainability of implementation, and knowledge transfer, mean that an open source solution is required for aerial mapping.
In 2016, the Humanitarian Innovation Fund (HIF) awarded the OpenDroneMap project (a consortium of organisations from the public, private and higher education sectors) a development and implementation grant to make its software more accessible, with specific emphasis on the humanitarian and civic-society sectors.
OpenDroneMap’s value proposition is that it enables users to create aerial mapping products with complete control and transparency of their data and processes used, so they can be efficiently and effectively integrated into new and existing mapping flow-lines.
The focus of the grant was to develop OpenDroneMap to make it scalable for humanitarian response, a large part of which was making the software more accessible and operationally fit-for-purpose. The OpenDroneMap team are pleased to report that thanks to the HIF grant the software is more user-friendly than ever before, and is poised to be adopted by a number of large NGOs and government teams worldwide in 2018.
OpenDroneMap uses user-supplied aerial images to create two core-products:
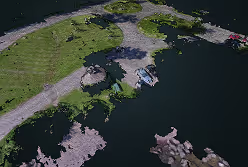
- A three-dimensional point-cloud of objects within the images (e.g. buildings and the ground) which can be used to create 3D models (see Figure 2 image d).
- The images and point cloud are used to construct a geometrically-corrected image of the ground (known as an “orthophoto”) which can be used as a high-resolution map (see Figure 2 image a).
Figure 2 shows OpenDroneMap outputs from Brighton Beach, Duluth, Minnesota, United States. Clockwise from top left: (a) Georectified Orthophoto. (b) Digital Surface Model (DSM), note pavilion and cars shown as higher elevation. (c) Digital Terrain Model (DTM) with pavilion and cars automatically removed. (d) Perspective view of the point cloud showing pavilion structure, cars and coastline. The data is available at https://demo.webodm.org.
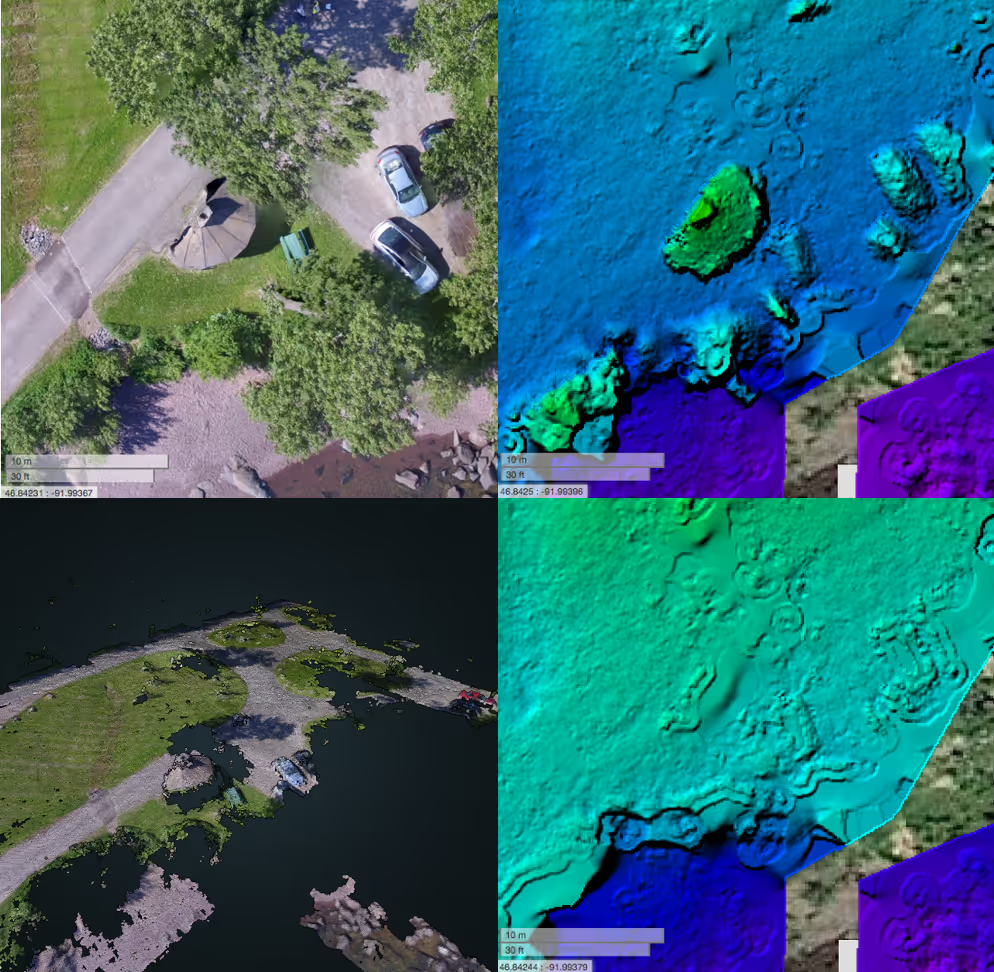
Through this project, a number of key improvements have been made to the core OpenDroneMap products. Using a morphological filter, points in the generated point-cloud are now classified as ground and non-ground returns to help delineate between surface features (e.g. buildings, trees) and the underlying terrain. This additional classification has supported the generation of two new products - a digital surface model (ground + objects) and a digital terrain model (ground), both of which are built using the Point Data Abstraction Library (PDAL) (see Figure 2).
These new products enhance the existing orthophoto output and will help humanitarian agencies quickly and effectively gain an understanding of both terrain and height of surface objects. Users working on flat-terrain such as fields can make use of the new fast-orthophoto option, also developed during this project, which reduces orthophoto processing times by up to 20% (see Figure 3). This is achieved by using a 2.5D model instead of a complete three-dimensional mesh for orthophoto correction.

In conjunction with the work on core-products, the OpenDroneMap team has focused on making the software more accessible and scaleable. Support for ground control points was added so that users can integrate their external survey control into the processing flowline for better locational accuracy, making the software suitable for generating survey-grade point-clouds and orthophotos.
To improve scalability the team has worked to use the Docker platform as the new core-architecture for OpenDroneMap deployments. Docker images containing all of the OpenDroneMap software and required libraries mean that users can get running instantly without having to undertake the software compilation process themselves. Docker support also provides options for a scalable workflow as it enables multiple instances to be deployed simultaneously so as to share processing tasks across multiple working nodes. A future blog post will delve further into the work on using the Docker images to create a scalable version of OpenDroneMap (ODM).
The HIF-funded work has been bolstered by efforts of the community on the Web-ODM product which provides a web-based user interface for the creation and processing of flights, and visualisation of the software’s outputs. Additional community contributions include a new vegetation index module which supports sensors that capture images in both near-infrared and visible wavelengths, often used for crop-health monitoring. Furthermore, the inclusion of a Simultaneous Localisation and Mapping (SLAM) library so that videos can be used as input instead of images, is helping to extend the utility of OpenDroneMap to support the multitude of different sensors that are now available on commercially-available drones.
With the HIF funding project now complete, OpenDroneMap is transformed into a viable option for humanitarian and civic-tech applications requiring aerial mapping solutions. Looking ahead to 2018, the OpenDroneMap team have a number of exciting updates to come, including geometric camera calibration and split-merge processing for large data-sets.
Stay updated
Sign up for our newsletter to receive regular updates on resources, news, and insights like this. Don’t miss out on important information that can help you stay informed and engaged.





{kind=link}
{kind=link}
Explore Elrha
Learn more about our mission, the organisations we support, and the resources we provide to drive research and innovation in humanitarian response.